
笔记介绍了 YOLOv1 的 backbone 部分实现细节, 以及 YOLOv1 的损失是如何计算的
模型结构介绍
先放代码 (代码来自豆包)
import torch
import torch.nn as nn
import torch.nn.functional as F
class YOLOv1(nn.Module):
def __init__(self, S=7, B=2, C=20):
super(YOLOv1, self).__init__()
self.S = S # 网格数
self.B = B # 每个网格预测的边界框数
self.C = C # 类别数
# 骨干网络(简化版)
self.conv_layers = nn.Sequential(
# 第一层
nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3),
nn.LeakyReLU(0.1),
nn.MaxPool2d(kernel_size=2, stride=2),
# 第二层
nn.Conv2d(64, 192, kernel_size=3, padding=1),
nn.LeakyReLU(0.1),
nn.MaxPool2d(kernel_size=2, stride=2),
# 第三层
nn.Conv2d(192, 128, kernel_size=1),
nn.LeakyReLU(0.1),
nn.Conv2d(128, 256, kernel_size=3, padding=1),
nn.LeakyReLU(0.1),
nn.Conv2d(256, 256, kernel_size=1),
nn.LeakyReLU(0.1),
nn.Conv2d(256, 512, kernel_size=3, padding=1),
nn.LeakyReLU(0.1),
nn.MaxPool2d(kernel_size=2, stride=2),
# 第四层
nn.Conv2d(512, 256, kernel_size=1),
nn.LeakyReLU(0.1),
nn.Conv2d(256, 512, kernel_size=3, padding=1),
nn.LeakyReLU(0.1),
# 重复卷积块...
nn.Conv2d(512, 1024, kernel_size=3, padding=1),
nn.LeakyReLU(0.1),
nn.MaxPool2d(kernel_size=2, stride=2),
# 第五层
nn.Conv2d(1024, 512, kernel_size=1),
nn.LeakyReLU(0.1),
nn.Conv2d(512, 1024, kernel_size=3, padding=1),
nn.LeakyReLU(0.1),
nn.Conv2d(1024, 1024, kernel_size=3, padding=1),
nn.LeakyReLU(0.1),
nn.Conv2d(1024, 1024, kernel_size=3, stride=2, padding=1),
nn.LeakyReLU(0.1),
# 第六层
nn.Conv2d(1024, 1024, kernel_size=3, padding=1),
nn.LeakyReLU(0.1),
nn.Conv2d(1024, 1024, kernel_size=3, padding=1),
nn.LeakyReLU(0.1),
)
# 全连接层
self.fc_layers = nn.Sequential(
nn.Linear(1024 * S * S, 4096),
nn.LeakyReLU(0.1),
nn.Dropout(0.5),
nn.Linear(4096, S * S * (C + B * 5))
)
def forward(self, x):
# 确保输入图像尺寸为448×448
x = F.interpolate(x, size=(448, 448), mode='bilinear', align_corners=False)
# 特征提取
x = self.conv_layers(x)
# 重塑张量
x = x.view(x.size(0), -1)
# 全连接层预测
x = self.fc_layers(x)
# 重塑为 [batch_size, S, S, C + B*5]
x = x.view(-1, self.S, self.S, self.C + self.B * 5)
return x
# 创建模型实例
def create_yolov1_model():
"""创建YOLOv1模型实例"""
model = YOLOv1(S=7, B=2, C=20)
return model
# 测试模型
if __name__ == "__main__":
model = create_yolov1_model()
x = torch.randn(1, 3, 448, 448) # 输入图像
output = model(x)
print(f"输出形状: {output.shape}") # 应输出 (1, 7, 7, 30)
结合 YOLOv1 论文的图片来对应分析
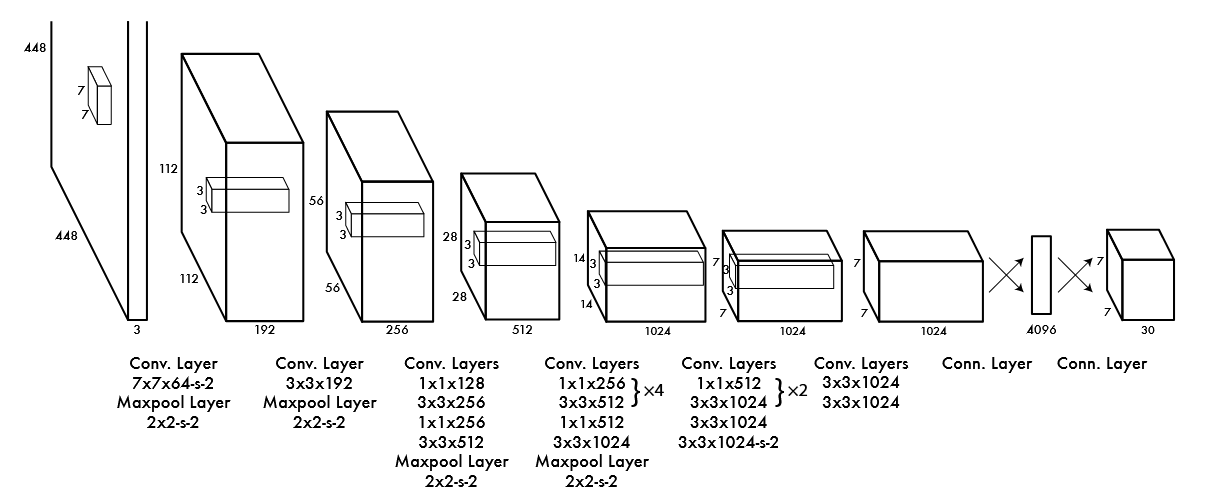
下面是从一篇综述里爬出来的 YOLOv1 的结构表:
| Type | Filters | Size/Stride | Output | |
|---|---|---|---|---|
| Conv | 64 | 7×7/2 | 224×224 | |
| Max Pool | 2×2/2 | 112×112 | ||
| Conv | 192 | 3×3/1 | 112×112 | |
| Max Pool | 2×2/2 | 56×56 | ||
| 1× | Conv | 128 | 1×1/1 | 56×56 |
| Conv | 256 | 3×3/1 | 56×56 | |
| Conv | 256 | 1×1/1 | 56×56 | |
| Conv | 512 | 3×3/1 | 56×56 | |
| Max Pool | 2×2/2 | 28×28 | ||
| 4× | Conv | 256 | 1×1/1 | 28×28 |
| Conv | 512 | 3×3/1 | 28×28 | |
| Conv | 256 | 1×1/1 | 28×28 | |
| Conv | 512 | 3×3/1 | 28×28 | |
| Conv | 256 | 1×1/1 | 28×28 | |
| Conv | 512 | 3×3/1 | 28×28 | |
| Conv | 256 | 1×1/1 | 28×28 | |
| Conv | 512 | 3×3/1 | 28×28 | |
| Conv | 512 | 1×1/1 | 28×28 | |
| Conv | 1024 | 3×3/1 | 28×28 | |
| Max Pool | 2×2/2 | 14×14 | ||
| 2× | Conv | 512 | 1×1/1 | 14×14 |
| Conv | 1024 | 3×3/1 | 14×14 | |
| Conv | 512 | 1×1/1 | 14×14 | |
| Conv | 1024 | 3×3/1 | 14×14 | |
| Conv | 1024 | 3×3/2 | 7×7 | |
| Conv | 1024 | 3×3/1 | 7×7 | |
| Conv | 1024 | 3×3/1 | 7×7 | |
| FC | 4096 | 4096 | ||
| Dropout 0.5 | 4096 | |||
| FC | 7×7×30 |
表里的 Filters 就是卷积核的个数, 也就是输出的通道数
详细介绍一下输入的第一次处理
从上面可以看到, 原始输入的图像是 448*448*3 的形状, 通道数可以不用管反正输出通道数只由卷积核个数决定, 那么 448*448 --> 224*224 是如何实现的呢
从代码可以看出, 第一个卷积层是
nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3)
这样的, 而输出的形状可以由下面的公式计算 (我们只讨论一般的长宽相等的卷积核)
\[H_{out} = \left\lfloor \frac{H_{in} + 2p - k}{s} \right\rfloor + 1\]核心参数:
- 输入高度: 通常表示为 $H_{in}$
- 卷积核 (滤波器): 大小为 $(k, k)$
- 步长 (stride): 卷积核移动的步长,通常为 $s$
- 填充 (padding): 在输入图像边缘添加的像素数,通常为 $p$
带入公式:
\[H_{out} = \frac{448 + 2*3 - 7}{2} + 1\]发现好像有点不对, 前面的那一部分也不能被 2 整除啊 (不是
其实这里需要了解到 $\left\lfloor \dots \right\rfloor$ 这个符号其实是 向下取整 的意思, 因为卷积核按照步长来移动计算, 但是如果遇到最后一个步长不够走的时候 (比如步长为 2, 但是最后只剩 1 格给你走, 那么这次就不要了), 豆包有一个图形化的解释:
输入: [x₁, x₂, x₃, x₄, x₅, x₆, x₇, x₈, x₉]
卷积核: [k₁, k₂, k₃] (k=3)
步长: s=2
移动过程:
1. [x₁, x₂, x₃] ✅
2. [x₃, x₄, x₅] ✅
3. [x₅, x₆, x₇] ✅
4. [x₇, x₈, x₉] ✅
5. [x₉, ?, ?] ❌ (无法完全覆盖,丢弃)
再详细介绍一下模型的最后几步
数据在经过一系列操作之后, 会得到 7*7*1024 这样的形状, 然后这里它引入了一个 4096 的全连接层, 也就是说首先对 7*7*1024 进行了展平操作, 变成一个 50176 大小的一维向量, 然后映射到 4096 再映射到 7*7*(2*5+20) = 1470, 最后对这个 1470 大小的一维向量重塑为 7*7*30 的形状
解释一下: 这里的
7*7*(2*5+20)表示, 最后相当于把图片分成了7*7大小, 每一块预测2个边缘框, 边缘框的5个信息 (位置2, 大小2, 置信度1), 模型能识别的类型个数为20
我们发现这里的最后有一个展平, 然后再重塑的过程, 那这一展平不就还是丢失空间信息了吗, 不过这里只是早期的 YOLO 特有的, 到 YOLOv2+ 之后会: 直接通过卷积层输出预测, 完全保留显式空间信息
损失介绍
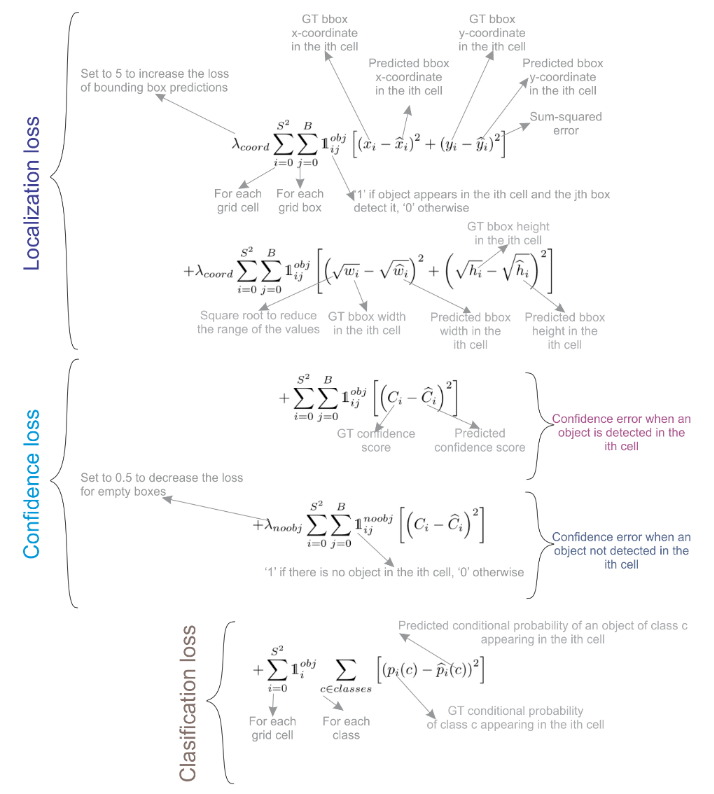
YOLOv1 的损失一共分为 5 个式子做加和得到:
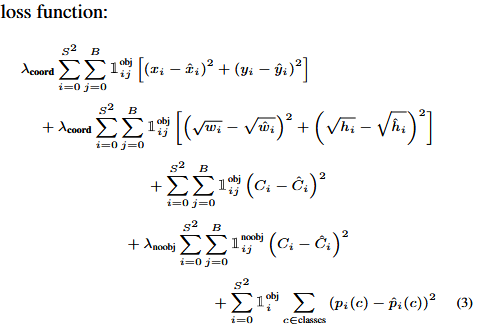
前两项都是位置损失, 第一个表示的是中心点画的准不准, 第二个表示框的宽和高画的对不对, 第三个是有目标的置信度损失, 第四个是无目标的置信度损失, 第五个表示的是类别分的对不对
前 2 个, 可以看成是一个回归问题, 可以使用 L2-loss 之类的, 最后 1 个, 可以看成是一个分类问题, 可以使用 cross-entropy loss (交叉熵损失) 这个地方不是用的交叉熵损失, 貌似所有的部分都使用的 L2-loss, 然后求的和
而中间 2 个, 有关置信度的
在YOLOv1中,每个边界框的 置信度 定义为:
\[\text{Confidence} = Pr(Object) \times IOU_{pred}^{truth}\]- $Pr(Object)$:表示边界框内存在目标的概率。
- $IOU_{pred}^{truth}$:预测框与真实框的交并比(Intersection over Union)
有目标的置信度损失
\[\sum_{i=0}^{S^2} \sum_{j=0}^{B} \mathbb{1}_{ij}^{obj} (C_i - \hat{C}_i)^2\]- 作用:对于负责检测目标的边界框,惩罚其置信度与真实IOU的偏差。
- 目标值:$C_i = IOU_{pred}^{truth}$(理想情况下,预测框与真实框完全重合,IOU=1)。
无目标的置信度损失
\[\lambda_{noobj} \sum_{i=0}^{S^2} \sum_{j=0}^{B} \mathbb{1}_{ij}^{noobj} (C_i - \hat{C}_i)^2\]- 作用:对于不包含目标的边界框,惩罚其高置信度预测(即抑制虚假检测)。
- 目标值:$C_i = 0$(因为没有目标,理想置信度为0)。
- 权重:$\lambda_{noobj}=0.5$,降低无目标框的损失权重(大多数网格不包含目标)。
YOLOv1:使用均方误差(MSE)计算置信度损失,区分有目标和无目标。
YOLOv2及以后:引入 逻辑回归 处理置信度预测,并使用 Objectness Score 显式表示目标存在概率,进一步优化了正负样本不平衡问题。
参考文献
[1] REDMON J, DIVVALA S, GIRSHICK R, et al. You Only Look Once: Unified, Real-Time Object Detection[A/OL]. arXiv, 2016[2024-04-19]. http://arxiv.org/abs/1506.02640.
[2] TERVEN J, CORDOVA-ESPARZA D. A Comprehensive Review of YOLO Architectures in Computer Vision: From YOLOv1 to YOLOv8 and YOLO-NAS[J/OL]. Machine Learning and Knowledge Extraction, 2023, 5(4): 1680-1716. DOI:10.3390/make5040083.