
这是一篇关于
stitching_detailed.py的学习笔记, 暂时主要记录一下如何从最后的拼接是如何进行的, 以及我需要保存一些什么样的数据, 来为我其它相同机位的图片的实时拼接提供帮助 (这篇笔记的内容大多不大正确, 真正的干货请看我 2026-03-31 的 blog, 但是这篇 blog 算是我的来时路, 就先不打算删了)
写在前面的话
本来这篇 blog 我预计是在 10.27 的时候写出来的, 但是代码在调试的时候, 一直报错, 所以一直在找 bug (还是太菜了 悲), 所以最后只能到今天来写了, 由于网上已经有大量的关于代码的解读, 虽然大多为 cpp 的代码解读, 但其实 py 写出来的逻辑和 cpp 的大差不差
具体的代码获取可以到 官方文档 里获取 (发现一份简单的源码要看 10 天, 好恐怖…)
为什么要 RTFSC
在最开始的时候, 我曾经尝试使用 计算机视觉方向简介 图像拼接 stitch 算法 - CSDN 博客 里提到的方法, 先计算出单应矩阵 H , 然后根据矩阵对图片进行变形和融合, 但是对于自己拍摄的图片进行融合之后发现效果非常不好, 于是使用了 opencv 提供的高级封装类 cv::Stitcher 对图片进行拼接, 发现效果非常好, 但是实际上放到视频流的时候, 发现对于实时的两张图片进行拼接的时候有两个问题:
- 速度特别慢, 拼接出来的视频流的实时性不能得到保证
- 拼接出来的图片尺寸一直在变, 视频流时大时小的
于是希望能对 cv::Stitcher 的实现细节有更深刻的理解, 看能不能固定一些参数, 从而提高拼接速度, 固定拼接尺寸. 上面提到的官方文档主要是对 cv::Stitcher 这个高层次的封装类的使用说明, 官网也说了, “如果想研究缝合流水线的内部结构或者你想试验详细的配置, 你可以使用 C++ 或者 python 中的缝合详细的源代码”
stitch 流程简介
据说官方给出的拼接流程如下图所示 (不过我也是在别人的 blog 里扒出来的)
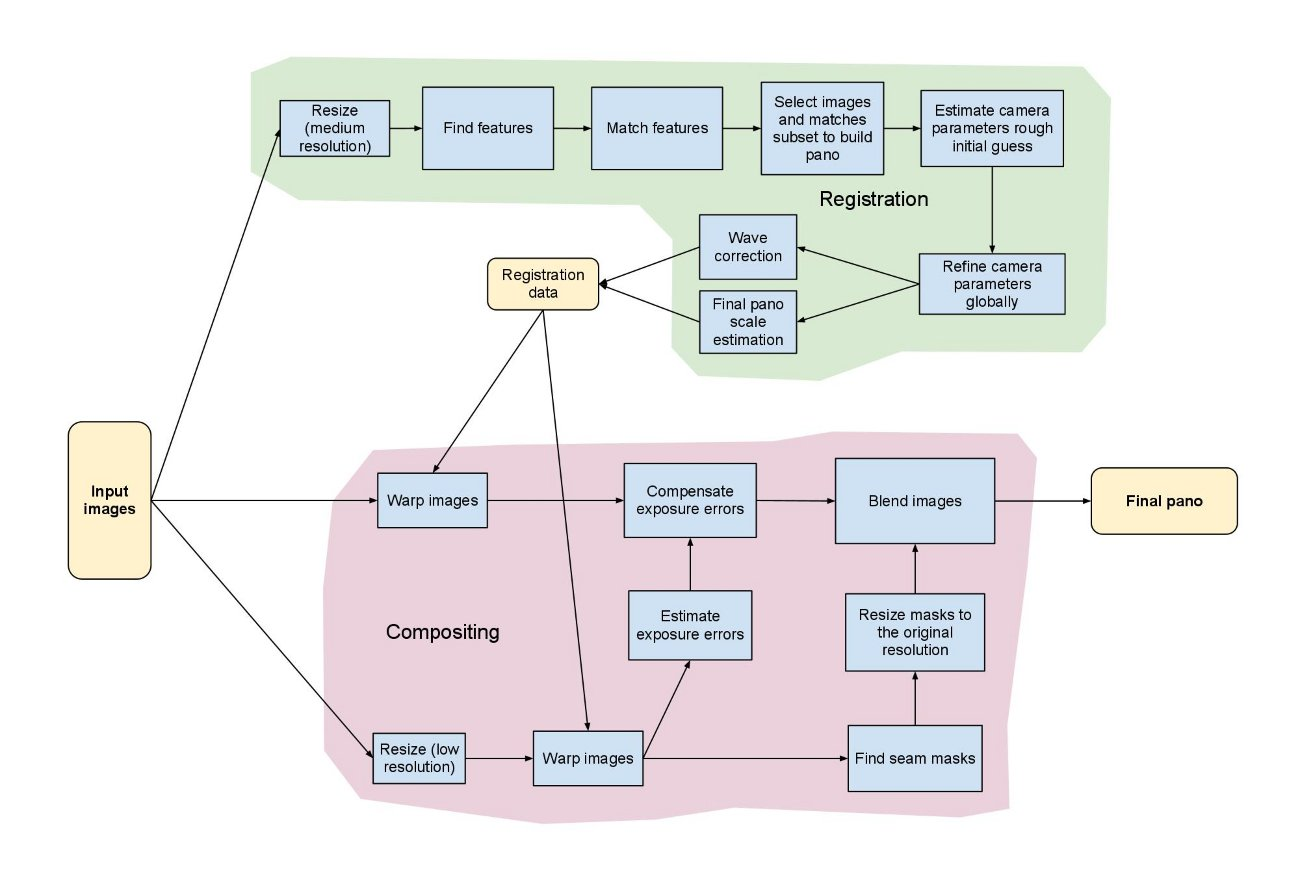
可以看出配准和融合是的尺度是不同的, 并且对相机的参数进行了两次的优化, 并没有使用 findHomography 这个函数获得单应矩阵, 而是通过相机的方式进行投影变换1
这个程序的第一步是导入各种设定的参数 (也就是读取 args 部分), 所以一开始我们需要知道这些参数是干什么的, 就拿官网给出的 参数 来讲
{kind=link}
boat5.jpg boat2.jpg boat3.jpg boat4.jpg boat1.jpg boat6.jpg \
–work_megapix 0.6 \
–features orb \
–matcher homography \
–estimator homography \
–match_conf 0.3 \
–conf_thresh 0.3 \
–ba ray \
–ba_refine_mask xxxxx \
–save_graph test.txt \
–wave_correct no \
–warp fisheye \
–blend multiband \
–expos_comp no \
–seam gc_colorgrad
这里部分参数的含义如下2
- work_megapix :在特征提取等 registration 过程中,为了减小耗时,会将图像进行缩放,这就需要一个缩放比例;
- features : 表示选用的提取的特征,(
SURF | ORB | SIFT | akaze)- matcher : 特征匹配方法,(
homography | affine), 单应性变换与仿射变换方法,分别对应 BestOf2NearestMatcher, AffineBestOf2NearestMatcher,后者会找到两幅图仿射变换的最佳匹配点;- estimator : (
homography | affine), 相机参数评估方法;- match_conf : 浮点型数据,表示匹配阶段内点判断的阈值;
- conf_thresh : 两幅图片是来自同一全景的阈值:
- ba : BA 优化相机参数的代价函数,(
no | reproj | ray | affine);- ba_refine_mask : BA 优化的时候,可以固定某些参数不动,通过指定 mask 实现。
x表示需要优化,_表示固定参数,对应的顺序是 fx, skew, ppx, aspect, ppy;- wave_correct : 波形矫正标志,有(
no | horiz | vert)三种类型,可以将拼接图像约束在水平方向,或者垂直方向,避免出现 “大鹏展翅” 的情况;- save_graph : 以 DOT 语言格式保存图像之间的匹配关系;
- warp : 图像变换方法,包括球面投影、柱面投影等,opencv 支持的投影方法比较多;
- seam_megapix : 寻找拼接缝的时候,会将图像进行缩放,此参数与 work_scale 可以用来控制缩放比例;
- seam : 接缝寻找的方法;
- compose_megapix : 预览时用于设置拼接过程中以及拼接图的分辨率;
- expos_comp : 光照补偿方法;
- blend : 图像融合方法,常用的有(
feather | multibend);
其实一开始看这么多参数也是懵的, 但是我们可以根据输入的参数, 先替换程序里参数对应的部分, 这里我贴出我的部分修改:
def main():
# args = parser.parse_args()
# img_names = args.img_names
img_names = ['pictures_double/cam_ed_1/0001.jpg', 'pictures_double/cam_ed_2/0001.jpg']
# img_names = ['A_fish.jpg', 'B_fish.jpg']
print(img_names)
# work_megapix = args.work_megapix
work_megapix = 0.6 # default
# seam_megapix = args.seam_megapix
seam_megapix = 0.1 # default
# compose_megapix = args.compose_megapix
compose_megapix = -1 # default
# conf_thresh = args.conf_thresh
conf_thresh = 0.3
# ba_refine_mask = args.ba_refine_mask
ba_refine_mask = 'xxxxx'
# wave_correct = WAVE_CORRECT_CHOICES[args.wave_correct]
wave_correct = None
# if args.save_graph is None:
# save_graph = False
# else:
# save_graph = True
save_graph = True
# warp_type = args.warp
warp_type = 'plane'
# warp_type = 'fisheye'
# blend_type = args.blend
blend_type = 'multiband' # 后面的blend选择会用上
# blend_strength = args.blend_strength
blend_strength = 5 # default
# result_name = args.output
result_name = 'result.jpg' # default
# if args.timelapse is not None:
# timelapse = True
# if args.timelapse == "as_is":
# timelapse_type = cv.detail.Timelapser_AS_IS
# elif args.timelapse == "crop":
# timelapse_type = cv.detail.Timelapser_CROP
# else:
# print("Bad timelapse method")
# exit()
# else:
# timelapse = False
timelapse_type = None
timelapse = False
# finder = FEATURES_FIND_CHOICES[args.features]() # 这里写的是图像匹配的特征类型, 默认为 surf 但是其实可以使用其它的东西
finder = cv.ORB.create()
seam_work_aspect = 1
full_img_sizes = [] # 用于存放原始图片的尺寸
features = [] # 用于存放特征, 这个特征是在work scale下的特征
images = [] # 这里的图片是seam scale下的图片 (缝隙尺寸是啥)
is_work_scale_set = False
is_seam_scale_set = False
is_compose_scale_set = False
就我个人对代码的阅读, 这个 stitching_detail 总共分为两个大的步骤:
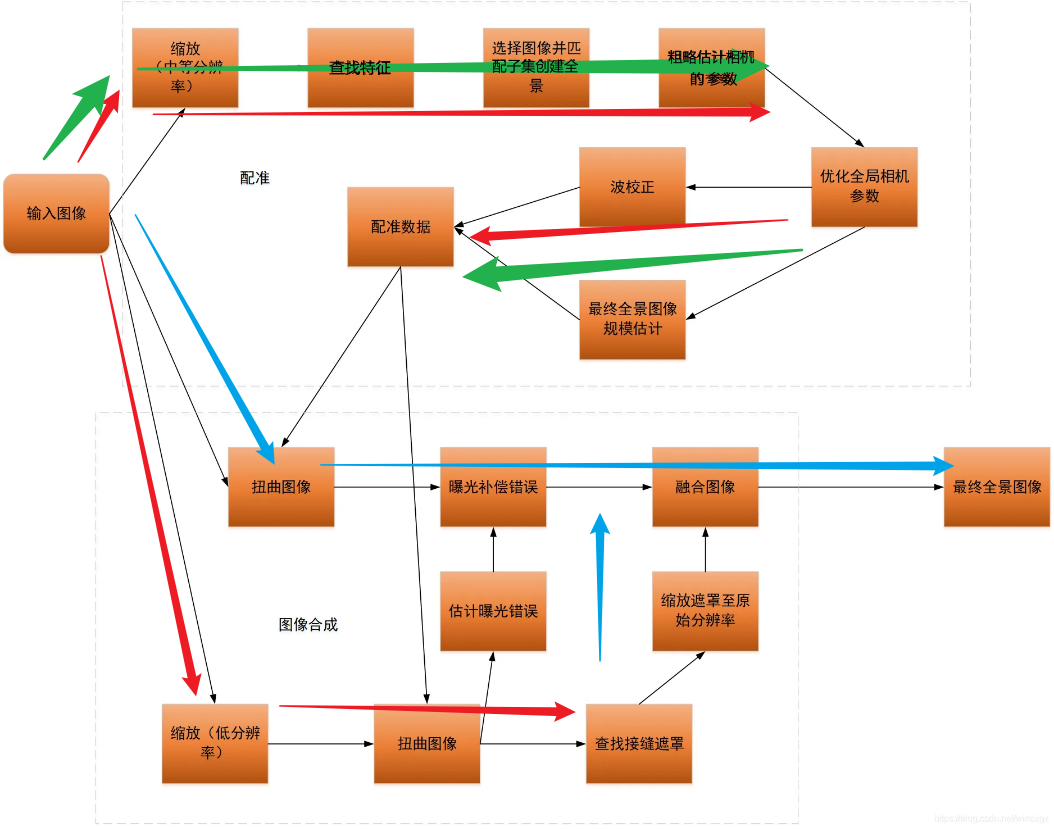
- 在 work_scale(中等分辨率) 下, 对图片进行处理, 目的是得到图片的 feature(特征), 通过对多张图片之间的 features 进行 match(匹配) 从而得到各个图片之间的关系, 然后对图片进行 subset(子集), 筛选出有足够多特征进行拼接的图片, 基于这些图片进行 camera(相机) 参数的估计和优化. 同时在 seam_scale(低分辨率) 下, 对图片进行 warp(扭曲), 得到 masks(接缝遮罩) 和 compensator(曝光错误). 这一块对应着下图的红色箭头的部分
- 在 compose_scale(一般情况就是原图) 下, 对图片进行 warp (扭曲), compensator.feed(曝光补偿), 根据 mask(遮罩) 进行 blender.feed(融合). 这一块对应着下图的蓝色箭头的部分
保存必要参数
我的想法, 是将得到图片配准数据的部分 (也就是绿色箭头的部分), 提前计算出来, 然后保存起来, 之后在用的时候, 直接读取这一部分的数据
而绿色部分做的工作主要是计算配准数据, 其实这个配准数据最后得到的是优化后的相机参数 cameras , 可以看到, 前面所作的工作包括查找特征, 筛选子集, 目的都是后面的估计相机参数, 然后根据指定的优化器对相机的参数进行优化 (此时计算出来的相机参数都是在 work_scale 下计算得到的, 在后期使用的时候这个参数要根据需求放缩到 seam_seale 下, 或是 compose_scale 下)
cameras 参数解析
发现得到的相机参数不能直接保存下来, 使用 pickle 直接保存会报错
通过查询 opencv 官方的文档, 可以知道得到的相机参数是一个 cv::detail::CameraParams 结构体, 具体可以参考 官方链接. 虽然链接里给的是 cpp 的实现, 其实 python 的实现是类似的, 可以看到这个结构体有一些关键的参数如: focal, ppx, ppy, R 等, 还有一个函数 K() , 但是这个函数没有具体的实现, 只知道会得到一个 Mat 类型的矩阵
通过对这个矩阵的分析, 发现在 python 里其实这个矩阵得到的是一个 3*3 的数组, 具体的值如下所示:
+-------+-------+-------+
| focal | 0 | ppx |
+-------+-------+-------+
| 0 | focal | ppy |
+-------+-------+-------+
| 0 | 0 | 1 |
+-------+-------+-------+
所以可以根据上述信息, 我希望构建一个简单的结构来保存得到的相机参数
MyCamera 类的构建
具体的构建如下:
import numpy as np
class MyCamera:
def __init__(self, R, focal, ppx, ppy):
self.R = R
self.focal = focal
self.ppx = ppx
self.ppy = ppy
def K(self):
K = np.array([[self.focal, 0 , self.ppx],
[0 , self.focal, self.ppy],
[0 , 0 , 1]])
return K
数据的保存和使用
此时得到的相机数据可以先保存到自定义的类里, 然后使用 pickle 保存
my_cameras = []
for i in range(0, 2):
R = cameras[i].R
focal = cameras[i].focal
ppx = cameras[i].ppx
ppy = cameras[i].ppy
my_cameras.append(MyCamera(R, focal, ppx, ppy))
with open('camera_params_list.pkl', 'wb') as f:
pickle.dump(my_cameras, f)
在使用数据的时候
with open('camera_params_list.pkl', 'rb') as f:
cameras = pickle.load(f)
在具体使用数据的时候根据上面的图可知, 此时需要做两大工作, 一部分是在 seam_scale 下 warp 图像, 得到 compensator(曝光补偿参数) 和 masks_warped(接缝遮罩), 还有一部分是在 compose_scale 下 warp 图像, 进行曝光补偿, 初始化 blender(融合器), 将遮罩放大到compose_scale, 最后将 images_warped_f_compose 和 masks_warped_compose 传入blender 里, 进行最后的拼接
关于使用参数可以参考一下代码:
def use_args(images, num_images, warp_type, work_scale, seam_scale, compose_scale, cameras):
focals = []
for cam in cameras:
focals.append(cam.focal)
focals.sort()
if len(focals) % 2 == 1: # 奇数张图片
warped_image_scale = focals[len(focals) // 2]
else: # 偶数张图片
warped_image_scale = (focals[len(focals) // 2] + focals[len(focals) // 2 - 1]) / 2 # 取中间两个值的平均
seam_work_aspect = seam_scale / work_scale
compose_work_aspect = compose_scale / work_scale
warper_seam = cv.PyRotationWarper(warp_type, warped_image_scale * seam_work_aspect)
corners_seam = []
masks_warped_seam = [] # 扭曲后的mask
images_warped_seam = []
images_warped_f_seam = []
for idx in range(0, num_images):
# 调整内参矩阵
img_seam = cv.resize(src=images[idx], dsize=None, fx=seam_scale, fy=seam_scale,
interpolation=cv.INTER_LINEAR_EXACT)
K = cameras[idx].K().astype(np.float32)
swa = seam_work_aspect
K[0, 0] *= swa
K[0, 2] *= swa
K[1, 1] *= swa
K[1, 2] *= swa
# 通过内参矩阵计算出 corner 和 warp 之后的 image
# corner, image_wp = warper_seam.warp(images[idx], K, cameras[idx].R, cv.INTER_LINEAR, cv.BORDER_REFLECT)
corner, image_wp = warper_seam.warp(img_seam, K, cameras[idx].R, cv.INTER_LINEAR, cv.BORDER_REFLECT)
corners_seam.append(corner)
images_warped_seam.append(image_wp)
images_warped_f_seam.append(image_wp.astype(np.float32))
# 通过内参矩阵计算出 p 和 warp 之后的 mask
# mask_seam = cv.UMat(255 * np.ones((images[idx].shape[0], images[idx].shape[1]), np.uint8))
mask_seam = cv.UMat(255 * np.ones((img_seam.shape[0], img_seam.shape[1]), np.uint8))
p, mask_wp = warper_seam.warp(mask_seam, K, cameras[idx].R, cv.INTER_NEAREST, cv.BORDER_CONSTANT)
masks_warped_seam.append(mask_wp.get())
expos_comp_type = cv.detail.ExposureCompensator_NO
compensator = cv.detail.ExposureCompensator_createDefault(expos_comp_type)
# 曝光补偿错误
compensator.feed(corners=corners_seam, images=images_warped_seam, masks=masks_warped_seam)
seam_finder = cv.detail_GraphCutSeamFinder('COST_COLOR_GRAD')
# 找到接缝遮罩
masks_warped = seam_finder.find(images_warped_f_seam, corners_seam, masks_warped_seam) # (这一句运行的特别慢!!!)
# masks_warped_0 = masks_warped[0].get()
warper_compose = cv.PyRotationWarper(warp_type, warped_image_scale * compose_work_aspect) # 这个用于后面的变换
compose_scale = 1
corners_compose = []
sizes_compose = []
blender = None
images_warped_f_compose = []
masks_warped_compose = []
for idx in range(0, num_images):
img = images[idx]
# cameras[idx].focal *= compose_work_aspect
# cameras[idx].ppx *= compose_work_aspect
# cameras[idx].ppy *= compose_work_aspect
sz = (int(round(img.shape[1] * compose_scale)), # 这里的size是反的
int(round(img.shape[0] * compose_scale)))
cwa = compose_work_aspect
K = cameras[idx].K().astype(np.float32)
K[0, 0] *= cwa
K[0, 2] *= cwa
K[1, 1] *= cwa
K[1, 2] *= cwa
roi = warper_compose.warpRoi(sz, K, cameras[idx].R)
corners_compose.append(roi[0:2])
sizes_compose.append(roi[2:4])
corner, image_warped = warper_compose.warp(img, K, cameras[idx].R, cv.INTER_LINEAR, cv.BORDER_REFLECT)
mask = 255 * np.ones((img.shape[0], img.shape[1]), np.uint8)
p, mask_warped = warper_compose.warp(mask, K, cameras[idx].R, cv.INTER_NEAREST, cv.BORDER_CONSTANT)
compensator.apply(idx, corners_compose[idx], image_warped, mask_warped)
images_warped_f_compose.append(image_warped.astype(np.int16))
dilated_mask = cv.dilate(masks_warped[idx], None) # 膨胀掩码
seam_mask = cv.resize(dilated_mask, (mask_warped.shape[1], mask_warped.shape[0]), 0, 0,
cv.INTER_LINEAR_EXACT) # 调整大小
mask_warped = cv.bitwise_and(seam_mask, mask_warped) # 按位与操作
masks_warped_compose.append(mask_warped)
if blender is None:
blend_strength = 5 # default
dst_sz = cv.detail.resultRoi(corners=corners_compose, sizes=sizes_compose)
blend_width = np.sqrt(dst_sz[2] * dst_sz[3]) * blend_strength / 100
blender = cv.detail_MultiBandBlender()
blender.setNumBands((np.log(blend_width) / np.log(2.) - 1.).astype(np.int32))
blender.prepare(dst_sz)
for idx in range(0, num_images):
blender.feed(cv.UMat(images_warped_f_compose[idx]), masks_warped_compose[idx], corners_compose[idx])
result = None
result_mask = None
result, result_mask = blender.blend(result, result_mask)
# cv.imwrite('result.jpg', result)
zoom_x = 600.0 / result.shape[1]
dst = cv.normalize(src=result, dst=None, alpha=255., norm_type=cv.NORM_MINMAX, dtype=cv.CV_8U)
dst = cv.resize(dst, dsize=None, fx=zoom_x, fy=zoom_x)
# cv.imshow('result', dst)
# cv.waitKey()
return dst